発表
合同会社ライフスペース研究所は、シーズ・ニーズマッチング交流会2023に、「片手走行と昇降・リクライニングができる車いす」を出展しました。
交流会は、2023年11月27日〜29日に大阪、2023年12月12日〜14日に東京で開催されました。
2023年10月1日から2024年1月31日まで、Web開催で出展機器の動画(下記)が配信されました。
詳しくはシーズ・ニーズマッチング交流会のホームページhttp://www.techno-aids.or.jpをご覧ください。
Presentation
Our company was exhibiting “The wheelchair that can run with single hand and can be lifted/reclined” at the Seeds and Needs Matching Exchange Meeting 2023.
The exchange meeting was held in Osaka from November 27th to 29th, and in Tokyo from December 12th to 14th, 2023.
From October 1, 2023, to January 31, 2024, videos of exhibited equipment (below) was distributed on the Web.
For details, please visit the website of the Seeds and Needs Matching Exchange Meeting.
http://www.techno-aids.or.jp.
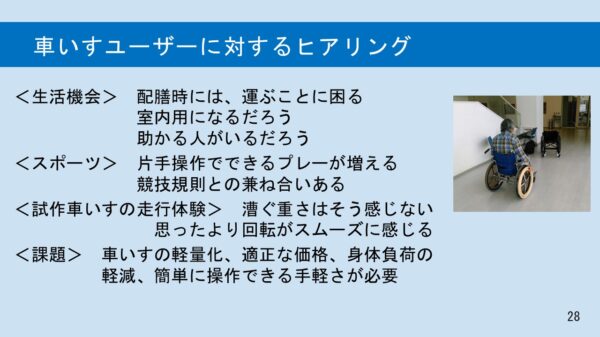
片手走行と昇降・リクライニングができる車いす
The wheelchair that can run with single hand and can be lifted/reclined
発表
合同会社ライフスペース研究所は、シーズ・ニーズマッチング交流会2022に、「改良型・片手でも走行できる6輪車いす」を出展しました。
交流会は、2022年12月14日〜16日に東京で開催されました。
詳しくはシーズ・ニーズマッチング交流会のホームページhttp://www.techno-aids.or.jpをご覧ください。
Presentation
Our company was exhibiting “a universal design wheelchair that allows you to hold your pet and drive with a single hand(improved 6-wheel)” at the Seeds and Needs Matching Exchange Meeting 2022.
The exchange meeting was held in Tokyo on December 14,15th and 16th, 2022.
For details, please visit the website of the Seeds and Needs Matching Exchange Meeting.
http://www.techno-aids.or.jp.
改良型・片手でも走行できる6輪車いす
the design and development of SINGLE-HANDEDLY OPERABLE WHEELCHAIR(improved 6-wheel)
発表
合同会社ライフスペース研究所は、シーズ・ニーズマッチング交流会2021に、「ペットを抱いて片手で走行できるユニバーサルデザインの車いす」を出展しました。
交流会は、2021年12月7日、8日に東京で開催されました。
詳しくはシーズ・ニーズマッチング交流会のホームページhttp://www.techno-aids.or.jpをご覧ください。
Presentation
Our company was exhibited “a universal design wheelchair that allows you to hold your pet and drive with a single hand” at the Seeds and Needs Matching Exchange Meeting 2021.
The exchange meeting was held in Tokyo on December 7th and 8th, 2021.
For details, please visit the website of the Seeds and Needs Matching Exchange Meeting.
http://www.techno-aids.or.jp.
片手操作可能な車いすの研究開発
the design and development of SINGLE-HANDEDLY OPERABLE WHEELCHAIR
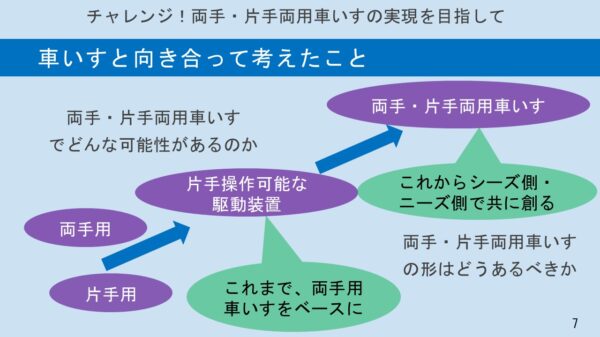
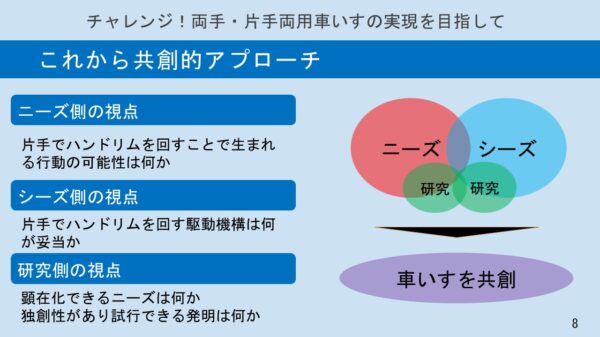
合同会社ライフスペース研究所は、シーズ・ニーズマッチング交流会2020のWeb開催で、「チャレンジ!両手・片手両用車いすの実現を目指して」と題し、講演しました。
Our company gave a lecture entitled “Challenge! Aiming to Realize Both-Handed and Single-Handed Wheelchairs” at the Seeds and Needs Matching Exchange Meeting 2020 on the Web.
動画版 Video
スライド版 Slide








特許 Patent
発明の名称 「片手操作可能な車椅子」 Title of The Invention SINGLE-HANDEDLY OPERABLE WHEELCHAIR
特許権者 合同会社ライフスペース研究所 Patentee Research Institute for Life Space, LLC
発明者 齊藤 徹 Inventor Toru Saito
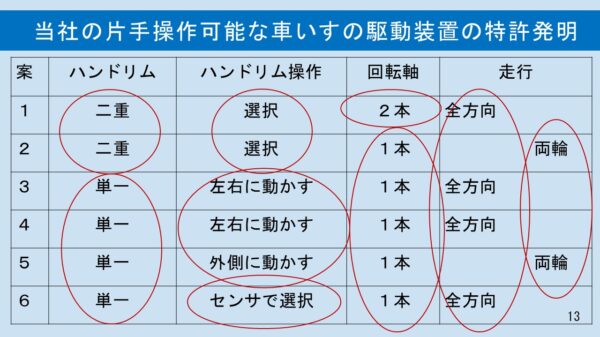
| タイプ1 Type1 | 国内特許第6853546号・PCT国際出願 Patent(Japan・PCT) |
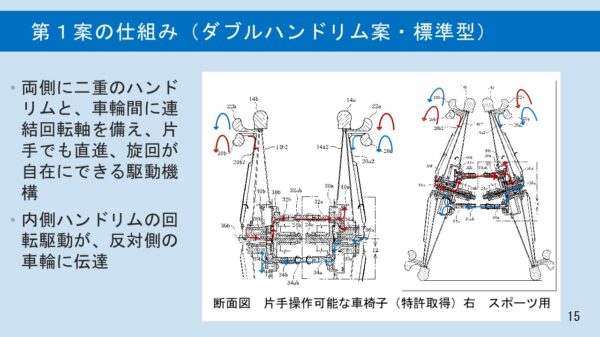
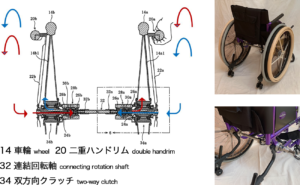
| 両側に二重のハンドリムと、車輪間に1本の連結回転軸を備え、片手でも直進、旋回が自在にできる駆動機構(双方向クラッチ方式) 内側ハンドリムの回転駆動が、反対側の車輪に伝達 |
A drive mechanism(Two-way clutch) method equipped with double handrims on both sides and one connecting rotation shaft between the wheels, allowing a single hand to move straight and turn freely. The rotational drive of the inner handrim is transmitted to the opposite wheel. |
|
|
|
| タイプ2 Type2 | 国内特許第6742493号・米国特許 Patent(Japan・USA) |
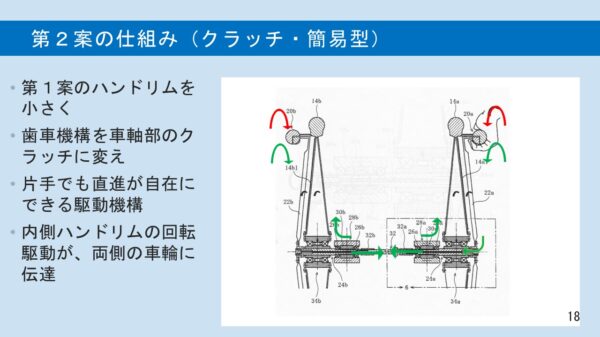
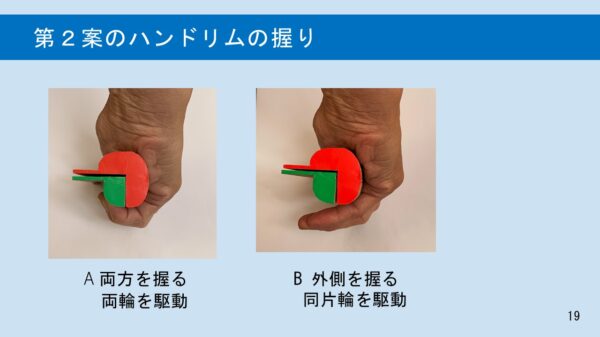
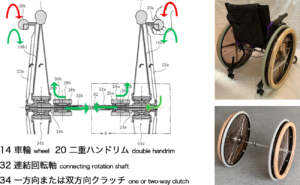
| タイプ1の簡易型 両側に二重のハンドリムと、車輪間に1本の連結回転軸を備え、片手でも直進ができる駆動機構(一方向または双方向クラッチ方式) 内側ハンドリムの回転駆動が、両方の車輪に伝達 |
A simple type of type 1 A drive mechanism(One or Two-way clutch method)equipped with double handrims on both sides and one connecting rotation shaft between the wheels, allowing a single hand to move straight. The rotational drive of the inner handrim is transmitted to both wheels. |
|
|
|
| タイプ3 Type3 | 国内特許第6288746号・PCT国際出願・米国特許 Patent(Japan・PCT・USA) |
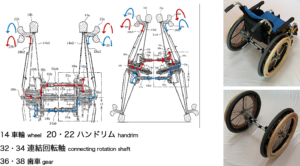
| 両側に二重のハンドリムと、車輪間に2本の連結回転軸を備え、片手でも直進、旋回が自在にできる駆動機構(歯車方式) 内側ハンドリムの回転駆動が、反対側の車輪に伝達 |
A drive mechanism (Gear method) equipped with double handrims on both sides and two connecting rotation shafts between the wheels, allowing a single hand to move straight and turn freely. The rotational drive of the inner handrim is transmitted to the opposite wheel. |
| 一般用 For general use | スポーツ用 For sports |
|
|
|
| タイプ4 type4 | 国内特許第6493943号・PCT国際出願 Patent(Japan・PCT) |
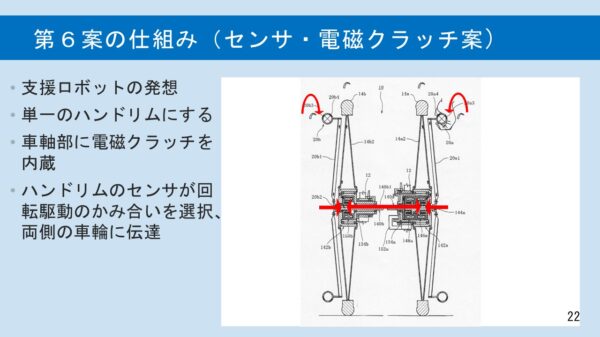
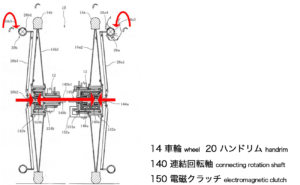
| 両側に単一のハンドリムと、車輪間に1本の連結回転軸を備え、片手でも直進、旋回が自在にできる駆動機構(電磁クラッチ方式) ハンドリムのセンサが車軸部の電磁クラッチを制御 回転駆動のかみ合いを選択し、左右の車輪に伝達 |
A drive mechanism (electromagnetic clutch method) that has a single handrim on both sides and one connecting rotation shaft between the wheels, allowing a single hand to move straight and turn freely. Handrim sensor controls the electromagnetic clutch on the axle. Select rotary drive engagement and transmit to each wheel. |
|
|
|
| タイプ5 type5 |
国内特許第6494853号・PCT国際出願 Patent(Japan・PCT) |
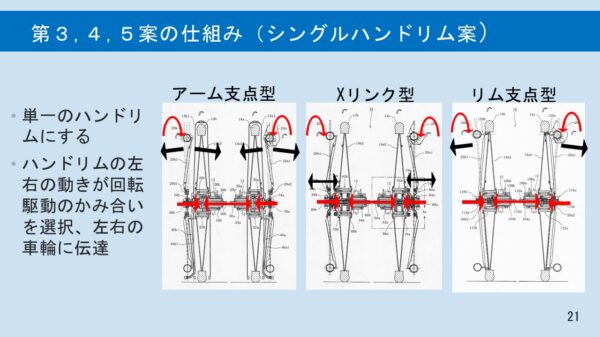
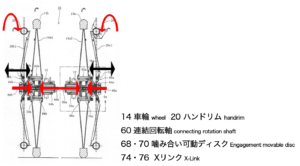
| 両側に単一のハンドリムと、車輪間に1本の連結回転軸を備え、片手でも直進、旋回が自在にできる駆動機構(Xリンク方式) ハンドリムの左右の動きが回転駆動のかみ合いを選択し、左右の車輪に伝達 |
A drive mechanism (X-link method) that has a single handrim on both sides and one connecting rotation shaft between the wheels, allowing a single hand to move straight and turn freely. The left and/or right movement of the handrim selects the rotary drive engagement and transmits it to the left and/or right wheels. |
|
|
|
| タイプ6 Type6 |
国内特許第6455953号・PCT国際出願 Patent(Japan・PCT) |
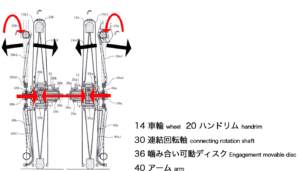
| 両側に単一のハンドリムと、車輪間に1本の連結回転軸を備え、片手でも直進、旋回が自在にできる駆動機構(アーム支点方式)
ハンドリムの左右の動きが回転駆動のかみ合いを選択し、左右の車輪に伝達 |
A drive mechanism (arm fulcrum method) that has a single handrim on both sides and one connecting rotation shaft between the wheels, allowing a single hand to move straight and turn freely.
The left and/or right movement of the handrim selects the rotary drive engagement and transmits it to the left and/or right wheels. |
|
|
|
| タイプ7 type7 | 国内特許第6548244号・PCT国際出願 Patent(Japan・PCT) |
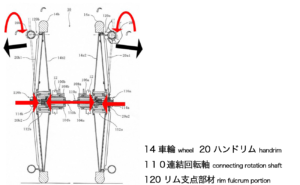
| タイプ6の簡易型 両側に単一のハンドリムと、車輪間に1本の連結回転軸を備え、片手でも直進、旋回ができる駆動機構(リム支点方式) ハンドリムの外側への動きが回転駆動のかみ合いを解除し、同じ側の車輪のみに伝達 |
A simple type of type 6 A drive mechanism (rim fulcrum method) that has a single handrim on both sides and one connecting rotation shaft between the wheels, allowing a single hand to move straight and turn. The outward movement of the handrim disengages the rotational drive and is transmitted only to the wheels on the same side. |
|
|
|